Dynamic LiDAR Re-simulation using Compositional Neural Fields
1ETH Zurich
2TU Munich
3Technion
4NVIDIA
CVPR 2024
Abstract
Overview
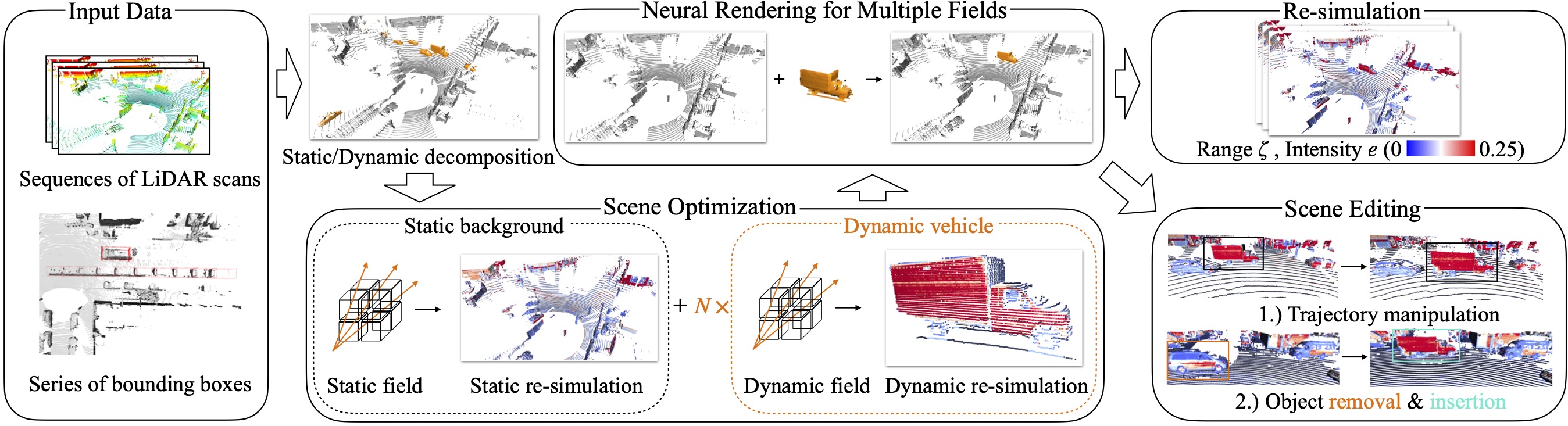
LiDAR novel view synthesis (NVS) by editing the scene
DyNFL enables to synthesize LiDAR novel views by editing the scene, such as vehicle removal, trajectory manipulation, and vehicle insertion. For each example, Original scene(Left) and scene after edition(Right) are demonstrated.
Vehicle removal
Trajectory manipulation
Vehicle insertion
LiDAR NVS with varying sensor configuration

LiDAR novel view synthesis by changing sensor elevation angle θ, poses (x, y, z) and number of beams on Waymo Dynamic dataset. The points are color-coded by the intensity values (0  0.25).
0.25).
Qualitative results for LiDAR range estimation
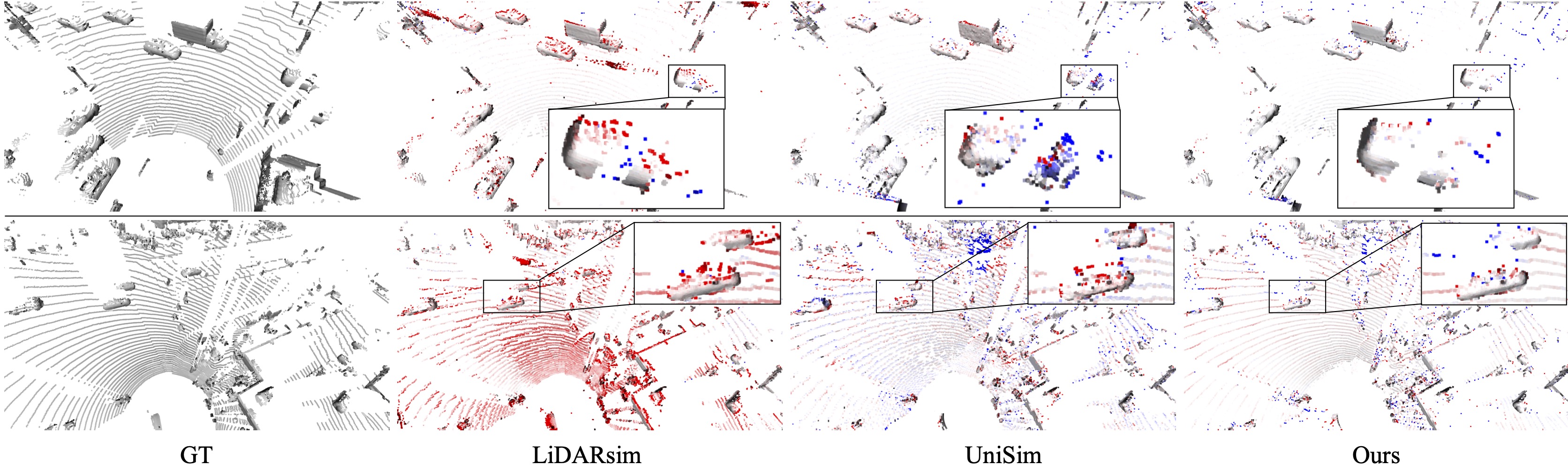
 100 cm).
100 cm).

Citation
@inproceedings{Wu2023dynfl,
title={Dynamic LiDAR Re-simulation using Compositional Neural Fields},
author={Wu, Hanfeng and Zuo, Xingxing and Leutenegger, Stefan and Litany, Or and Schindler, Konrad and Huang, Shengyu},
booktitle = {The IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2024}
}